Human learning is a remarkably efficient process, enabling us to observe, replicate, and adapt actions based on shared cognitive and physical frameworks. This inter-human learning paradigm, honed over millennia, contrasts sharply with the challenges of transferring skills between entities with fundamentally different architectures. While programming robots to mimic human actions or even learn from human observation is achievable, teaching diverse robotic systems the same task without bespoke coding for each platform has remained a significant hurdle. This limitation has historically restricted the widespread adoption of robots in complex, dynamic environments where adaptability and rapid skill acquisition are paramount.
Addressing this long-standing challenge, researchers at the Federal Technology Institute of Lausanne (EPFL) in Switzerland have developed a novel approach called 'kinematic intelligence'. This system facilitates learning-from-demonstration (LfD) in a manner that transcends the physical and computational differences between robots. By abstracting observed actions into a transferable strategy, kinematic intelligence allows robots with vastly dissimilar morphologies and operational systems to acquire new skills from a single human demonstration, dramatically reducing development time and expertise requirements.
Kinematic Intelligence: A Paradigm Shift in Robot Skill Transfer
The breakthrough system, detailed in Science Robotics, moves beyond traditional LfD methods that typically require robots of identical models or extensive re-programming. Kinematic intelligence introduces the concept of 'kinematic intelligence' to LfD, enabling robots to interpret a human demonstration and translate it into an adaptable strategy tailored to their unique physical constraints. This includes accommodating varying joint limits, balance capabilities, and other morphological characteristics.
This innovative approach allows dissimilar robots to learn new skills from the same demonstration, a significant advancement over prior methods. The system mathematically processes the observed action, converting it into a universal strategy that can be adapted by any robot. This adaptability ensures that the robot's movements are not only learned but also remain within safe and feasible operational parameters, regardless of the robot's specific design.
The Mechanics of Learning from Demonstration
The core of kinematic intelligence lies in its ability to generalize learned behaviors across a wide spectrum of robotic platforms. Researchers motion-captured humans performing various object manipulation tasks, such as setting, shoving, tossing, and positioning. This data served as the initial blueprint for skill acquisition.
Crucially, the system incorporates a classification of diverse robotic physical constraints. This includes defining limits for balance and the range of motion for each joint. By blending this robotic-specific data with the human motion-capture data, the system creates a robust framework for observational and adaptive learning, allowing robots to interpret and execute tasks effectively.
Experimental Validation and Real-World Implications
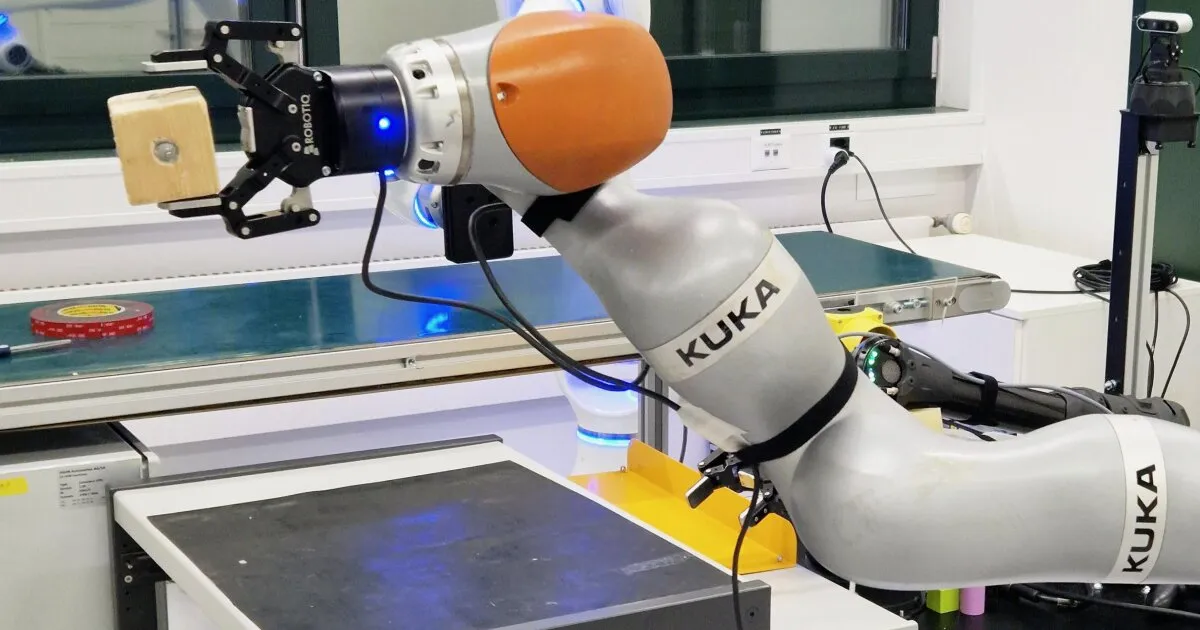
To validate the efficacy of kinematic intelligence, researchers conducted experiments using three distinct commercial robots. These robots, possessing significantly different physical structures, were tasked with a series of assembly line operations. The objectives included pushing wooden blocks from a conveyor belt to a workstation, moving them onto tables, and safely depositing them into receptacles.
The results demonstrated remarkable success, with all three robots reliably and safely performing the tasks after learning from the same human demonstration. This achievement highlights the system's capability to enable robots to interpret and execute skills in their own unique, yet effective, manner, irrespective of their underlying hardware or software architecture.
The Future of Robot Programming
The long-term vision for kinematic intelligence extends beyond simply teaching robots existing skills. The ultimate goal, as articulated by the researchers, is to enable humans to describe novel actions for robots to perform, potentially without the need for direct robot observation or any form of custom coding. This would involve a user interface where an individual can convey an idea and the desired behavior, and the robot would autonomously handle the execution.
This future scenario promises to democratize robot programming, removing the necessity for specialized technical expertise. By abstracting the complexities of robotic control and adaptation, kinematic intelligence could significantly accelerate the deployment of robots in various industries, making them more accessible and versatile tools for a wide range of applications.
Impact Analysis
The development of kinematic intelligence represents a significant leap forward in the field of robotics, particularly in the domain of skill transfer and generalization. By overcoming the need for task-specific code for dissimilar robotic platforms, this technology has the potential to drastically reduce the cost and complexity associated with robot deployment and programming. This could lead to a more rapid integration of robotics into manufacturing, logistics, and other industries, fostering greater automation and efficiency. Furthermore, the prospect of users simply describing desired actions, rather than programming them, could pave the way for more intuitive human-robot collaboration and a broader accessibility of robotic capabilities to non-expert users.