
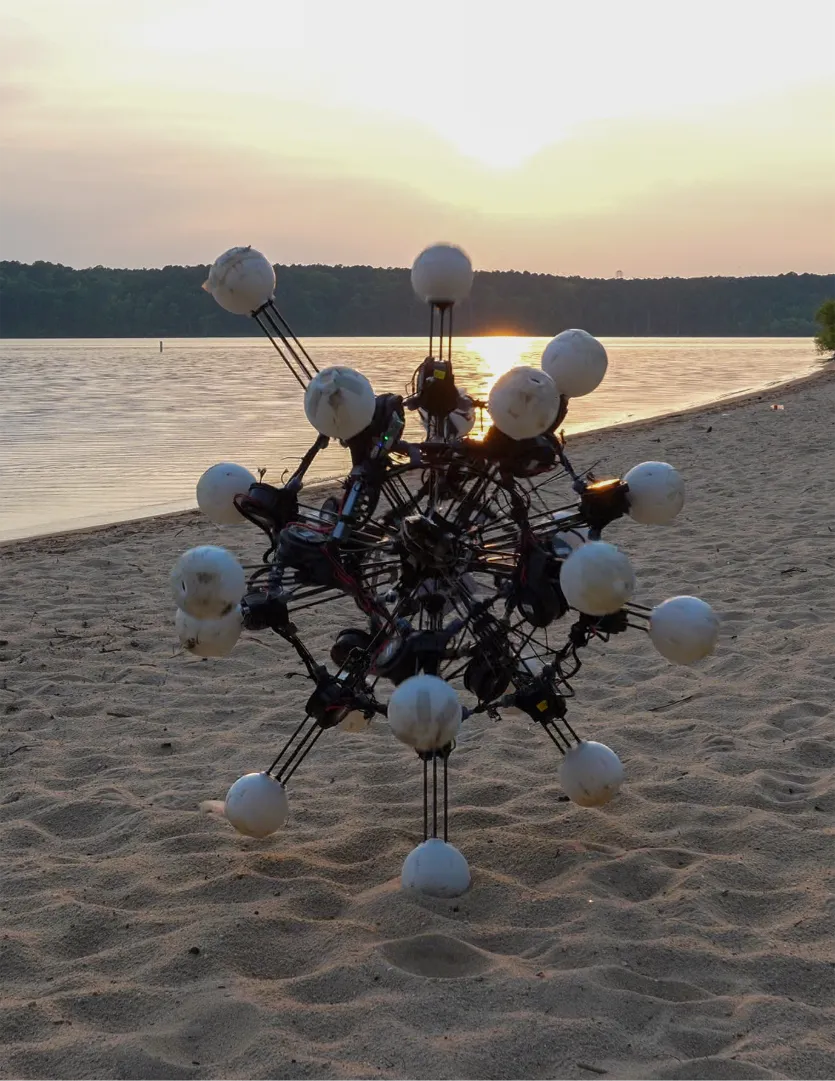
Robotics research has long drawn inspiration from the biological world, leading to the creation of machines mimicking humanoids, canines, insects, and even horses. However, recent advancements suggest that the ideal robotic form might deviate significantly from these familiar biological blueprints. A groundbreaking development from Duke University has introduced a robot named Argus, distinguished by its 20 telescoping legs radiating from a central body, challenging conventional notions of optimal robotic locomotion and adaptability.
This novel design, inspired by the principles of dynamic isotropy, allows Argus to move and stabilize with exceptional efficiency in virtually any direction. Each leg tip is equipped with a depth camera, contributing to its advanced navigation capabilities. The researchers' exploration into the mathematical concept of dynamic isotropy, rather than direct biological mimicry, has yielded a robot capable of unprecedented versatility across diverse terrains and conditions, including climbing walls and carrying substantial payloads.
The Genesis of Argus: Dynamic Isotropy and Symmetrical Design
The development of Argus stemmed from extensive computational exploration, involving over 1,500 simulations exploring various robot configurations. The core principle guiding this research was dynamic isotropy, a measure of how evenly a robot can accelerate its center of mass in all directions. A robot scoring high in dynamic isotropy, like Argus with its 0.91 score, exhibits nearly identical responsiveness and movement capabilities regardless of orientation. This contrasts sharply with many existing robots, including popular quadrupedal and humanoid models, which typically score below 0.6, indicating preferential movement or stability in certain directions.
This focus on dynamic symmetry liberates robots from the need to maintain a specific orientation relative to their environment. As articulated by Boyuan Chen, director of Duke's General Robotics Lab, when a robot can accelerate equally well in all directions, the concepts of 'forward,' 'backward,' 'left,' and 'right' become interchangeable, fundamentally altering the complexity of robot control. The design itself is based on a regular dodecahedron, a geometric shape with 12 pentagonal faces, which contributes to its uniform field of view and omnidirectional movement capabilities without requiring constant reorientation.
Testing the Limits: Argus in Real-World Scenarios
To validate its theoretical advantages, Argus underwent rigorous testing across varied terrestrial environments on the Duke campus. The robot successfully navigated concrete, grass, dense foliage, soft sand, and wet surfaces. It demonstrated an impressive ability to overcome obstacles up to 5 inches (12.7 centimeters) high and maintained functionality even when three of its legs were damaged. Furthermore, Argus proved capable of pushing a 3-foot (1-meter) cube while in motion, showcasing its robust capability to exert force and maneuver heavy objects.
 The researchers deliberately exposed Argus to challenging conditions to assess its resilience and adaptability. The robot’s ability to perform across such a wide spectrum of terrains and conditions, coupled with its capacity to withstand damage, underscores the effectiveness of its dynamically symmetrical design. This practical validation moves the concept from theoretical possibility to demonstrated performance, highlighting the potential for such robots in complex, unpredictable environments.
The researchers deliberately exposed Argus to challenging conditions to assess its resilience and adaptability. The robot’s ability to perform across such a wide spectrum of terrains and conditions, coupled with its capacity to withstand damage, underscores the effectiveness of its dynamically symmetrical design. This practical validation moves the concept from theoretical possibility to demonstrated performance, highlighting the potential for such robots in complex, unpredictable environments.
Broader Implications for Future Robotics
While Argus is presented as a proof of concept, its significance extends beyond its immediate capabilities. The research offers a novel mathematical framework for evaluating and designing robotic forms, moving beyond simple biological imitation. This approach provides a quantifiable method for comparing different robot designs and for creating entirely new form factors optimized for specific tasks or environments, including potential applications in low-gravity settings.
The findings suggest that the pursuit of optimal robotic locomotion may increasingly rely on fundamental mathematical principles rather than solely on biomimicry. By prioritizing dynamic symmetry, researchers can engineer robots that are inherently more adaptable, versatile, and resilient. This paradigm shift could unlock new possibilities for robotics in exploration, disaster response, and other fields requiring machines capable of navigating complex and dynamic real-world conditions.




