Navigating the challenging, sandy landscapes of Mars presents a unique set of engineering hurdles. Traditional wheeled rovers can struggle with loose regolith and steep inclines, risking immobilization. To overcome these obstacles, German engineers have developed a novel ground rover design that draws inspiration from a most unlikely source: the African sandfish (Scincus scincus). This reptile, native to the Sahara Desert, possesses an extraordinary ability to 'swim' through sand, a locomotion technique that researchers believe could revolutionize future Mars exploration vehicles.
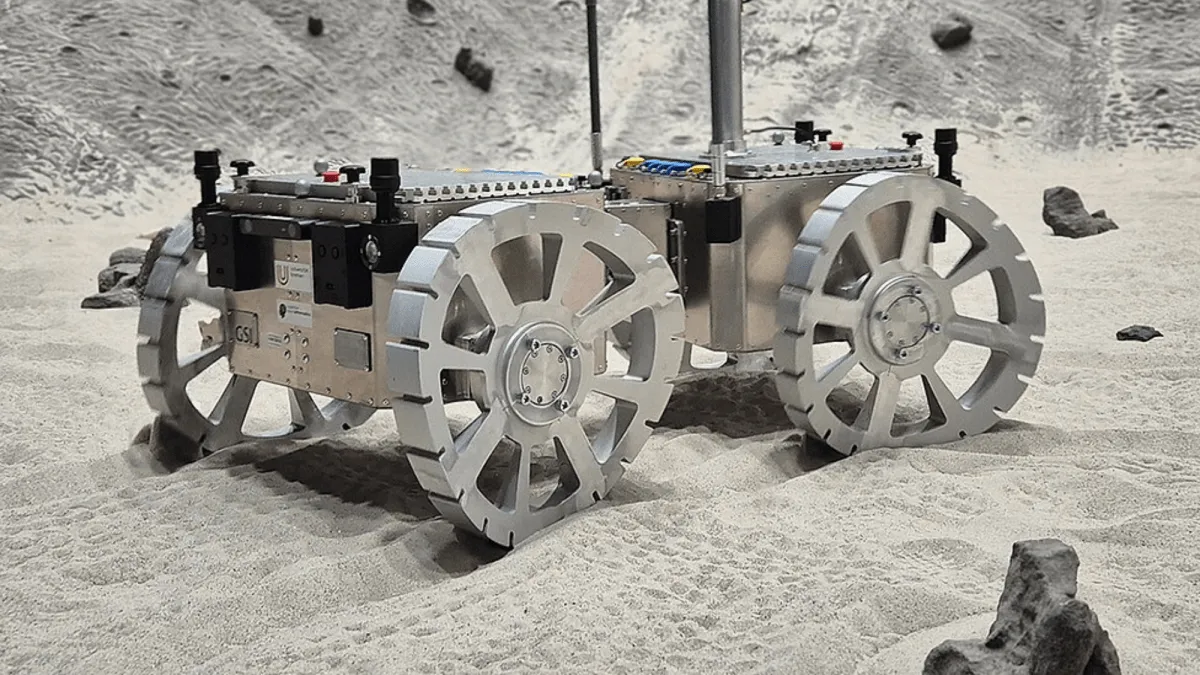
The experimental rover, developed at the University of Würzburg, utilizes a propulsion system that mimics the sandfish's undulating movement. Instead of conventional rolling, its four independently controlled wheels generate a figure-eight motion. This dynamic action allows the rover to effectively push through granular material, much like a fish navigates water, potentially offering superior mobility in environments where wheeled or tracked vehicles might falter. Initial demonstrations showcase the rover's capability to traverse simulated Martian terrain, leaving distinctive sinusoidal tracks as evidence of its unique traversal method.
Biomimicry in Martian Exploration: The Sandfish Rover
The Unique Challenges of Martian Sand
The surface of Mars is characterized by vast expanses of fine, powdery regolith. This granular material behaves in complex ways, exhibiting properties that can range from solid-like to fluid-like depending on factors such as particle size, moisture content, and the applied force. For robotic explorers, this presents significant challenges: wheels can spin without gaining traction, especially on slopes, and can easily become bogged down in softer patches of sand. The unpredictable nature of the Martian surface, with its craters, dunes, and rocky outcrops, further exacerbates the difficulty of maintaining stable locomotion.
Traditional rover designs, while robust, are not optimally suited for these specific conditions. The constant risk of getting stuck or losing traction necessitates careful route planning and can limit the operational range and efficiency of missions. Therefore, exploring alternative locomotion methods that can better handle unconsolidated granular media is a critical area of research for enhancing the capabilities of future Martian surface missions.
Nature's Solution: The African Sandfish
The African sandfish, Scincus scincus, is a master of subterranean movement. Despite possessing relatively small limbs, this skink lizard has evolved a remarkable method for burrowing and moving through loose sand. Scientific studies, including those utilizing X-ray imaging, have revealed that the sandfish generates propulsive force by creating a powerful, wave-like motion with its body. This oscillation allows it to efficiently overcome the drag and resistance of the sand, enabling it to 'swim' beneath the surface.
The lizard's body shape and limb movements are precisely adapted for this environment. Its wedge-shaped head may also play a role in generating lift, further assisting its movement through the granular medium. This biological marvel provides a compelling blueprint for engineers seeking to design robots capable of similar subsurface or loose-terrain traversal.
Translating Biological Motion to Engineering Design
Inspired by the sandfish's natural locomotion, engineers have begun to develop robotic systems that emulate its 'swimming' technique. One notable effort, from Georgia Tech in 2011, resulted in a sandfish robot designed to move through granular materials. Early iterations of these robotic designs demonstrated the potential of this approach, showing that mimicking the lizard's body undulations could indeed facilitate movement through sand.
The University of Würzburg's current project builds upon this concept, focusing on a wheeled rover that translates the sandfish's body wave into wheel rotation. The figure-eight motion generated by each wheel effectively 'digs' into the sand and propels the rover forward, while also providing lateral stability. This method contrasts sharply with traditional wheels, which primarily rely on friction and direct traction.
Performance and Future Prospects
Researchers have reported that the sandfish-inspired rover demonstrated superior performance in sandy test environments compared to a conventionally wheeled prototype. While traditional wheels struggled with instability and slippage, the oscillating wheels of the new design maintained a more stable trajectory. However, the development process has not been without its challenges.
Early versions of the rover were too heavy, causing them to sink into the sand. Subsequent redesigns focused on reducing the overall mass and increasing the width of the wheels to improve buoyancy and stability. While this biomimetic approach shows great promise for specialized terrains, further research is needed to refine control systems, manage slippage in varied conditions, and integrate scientific payloads. It is unlikely to replace current rover designs entirely in the short term but represents a significant advancement in locomotion technology for planetary exploration.
Impact Analysis
The development of the sandfish-inspired rover signifies a crucial step in applying biological principles to extreme environment robotics. By studying and replicating the locomotion strategies of desert-dwelling organisms, engineers are developing more robust and adaptable machines for planetary exploration. This biomimetic approach not only addresses the specific challenges of Martian sand but also opens avenues for designing robots capable of navigating similarly difficult terrains on other celestial bodies, such as the icy moons of Jupiter or Saturn, or even for terrestrial applications in search and rescue or resource extraction in unstable environments. The success of this project underscores the value of interdisciplinary research, merging biology, engineering, and robotics to push the boundaries of exploration technology.




